IEEE ICRA 2018 - Robots and Art Forum - Robots that Draw and Automating Art by Todd Murphey
This is an invited talk presented at the Robots and Art Forum at the IEEE International Conference on Robotics and Automation in Brisbane, Australia on 24 May ...
Robotic Art
Industrial Automation and Control - A Galco TV Tech Tip
Industrial automation is a set of technologies that uses control systems and devices, such as computer software and robotics, to enable automatic operation of ...
GalcoTV
Online Trajectory Planning and Force Control for Automation of Robotic Surgery
"Online Trajectory Planning and Force Control for Automation of Surgical Tasks" Osa, T.; Sugita, N.; Mitsuishi, M. IEEE Transactions on Automation Science and ...
Takayuki Osa
Alessandro De Luca - A Control Architecture for Human Robot Collaboration
Abstract: The talk focuses on basic control problems related to physical Human-Robot Interaction (pHRI), ranging from on-line collision avoidance to collision ...
IEEE.RAS.ICRA
CS-Freiburg vs. Carnegie Mellon University (CMU) Hammerheads, RoboCup Seattle, 2001
T. Weigel, J. -S Gutmann, M. Dietl, Alexander Kleiner and B. Nebel. 2002. CS Freiburg: Coordinating Robots for Successful Soccer Playing. IEEE transactions on ...
Alexander Kleiner
Robots @ CSIRO : Autonomous Ground Vehicles.
I put together a short video summarising part of our current AGV robotics research going on in the Autonomous Systems Lab at CSIRO. The vehicle is a John ...
Paulo Vinicius
Real-Time Robotic Manipulation of Cylindrical Objects in Dynamic Scenarios
For more information, please see our paper published at IEEE Transactions on Robotics https://ieeexplore.ieee.org/document/8489921 ...
ehsan asadi
Symposium on Blockchain for Robotic Systems
Robotic systems are revolutionizing applications from transportation to health care. However, many of the characteristics that make robots ideal for future ...
MIT Media Lab
User Modelling for Personalised Dressing Assistance by Humanoid Robots
User Modelling for Personalised Dressing Assistance by Humanoid Robots,” by Yixing Gao, Hyung Jin Chang, and Yiannis Demiris, from Imperial College ...
IEEE Spectrum
Keynote talk at ICRA 2016 on Wearable Haptics and Wearable Robotics - Prattichizzo
WEARABLE HAPTICS AND WEARABLE ROBOTICS - the robotic sixth finger, supernumerary limbs, to compensate the hand function in subjects with upper limb ...
SIRSLab Siena-Robotics-Systems-Lab. Prattichizzo
CS-Freiburg vs. Artisti Veneti, RoboCup Seattle, 2001
T. Weigel, J. -S Gutmann, M. Dietl, Alexander Kleiner and B. Nebel. 2002. CS Freiburg: Coordinating Robots for Successful Soccer Playing. IEEE transactions on ...
Alexander Kleiner
CS-Freiburg vs. Carnegie Mellon University, RoboCup Seattle, 2001
T. Weigel, J. -S Gutmann, M. Dietl, Alexander Kleiner and B. Nebel. 2002. CS Freiburg: Coordinating Robots for Successful Soccer Playing. IEEE transactions on ...
Alexander Kleiner
Optimal Safe Planning and Reactive Control for Industrial Robots working in the vicinity of humans
The algorithm developed by Nima Najmaei at University of Western Ontario, London ON. For more information refer to: http://www.nimanajmaei.com/hri-project ...
Nima Najmaei
"Physical Attack Protection of IC Chips for Hardware Security" - Presented by Makoto Nagata
Abstract: Side-channel attacks have emerged as the nondestructive threats of security vulnerability in cryptographic hardware. This short vide provides an ...
IEEE Solid-State Circuits Society
Planning Wrench-Feasible Motions for Cable-Driven Hexapods
This video is associated with the paper "Planning Wrench-feasible Motions for Cable-driven Hexapods" published in the journal "IEEE Transactions on Robotics" ...
Lluís Ros
Mobile Mapping Indoors and Outdoors with Zebedee
Zebedee is a handheld 3D mobile mapping system developed at CSIRO. The primary sensor is a 2D Hokuyo lidar scanner which measures the distances to ...
Robotics and Autonomous Systems Group CSIRO Data61
Task space control of robot manipulators with null-space compliance
Video related to the following work Hamid Sadeghian, Luigi Villani, Mehdi Keshmiri, Bruno Siciliano, “Task space control of robot manipulators with null-space ...
PRISMA Lab
Super Dragon: A 10-m-Long-Coupled Tendon-Driven Articulated Manipulator
Suzumori Endo Lab, Tokyo Tech developed a 10 m-long articulated manipulator for investigation inside the primary containment vessel of the Fukushima Daiichi ...
Suzumori Endo Robotics Laboratory
Mohammed Bennamoun - University of Western Australia
Video describing some of the work that Dr. Umar Asif did for his PhD work under the supervision of Mohammed Bennamoun and Ferdous Sohel. Work was ...
Mohammed Bennamoun
Robots for Physical Interaction
"Robots for Physical Interaction" While robots dominate repetitive labor tasks in factories, the design and controller of these robots are not suitable for relatively ...
OhioStateMAE
Model predictive control framework for human robot collaboration
This is a proof of concept of an MPC framework for human robot collaboration. An online predictive planner modifies the motion of the robot by slowing down the ...
Intelligent Robots and Autonomous Systems
Understanding Control System
Understanding Control System- In this video you will understand basics of control system. You can unlock the full course at 20% for $39 at: ...
Rajvir Singh
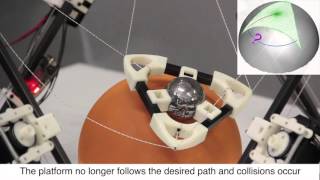
Constant-position singularity surface of a Stewart-Gough robotic platform
Singularity surface of a Stewart-Gough platform with one point fixed, computed using the CUIK Suite. See also: ...
Oriol Bohigas
Cloud Robotics
A short video that talks about the basics of cloud robotics. References Abbeel, P., Goldberg, K., Kehoe, B., & Patil, S. (2015, April 3). A Survey of Research on ...
Tristan Ptacek
SVO: Fast Semi-Direct Monocular Visual Odometry
We propose a semi-direct monocular visual odometry algorithm that is precise, robust, and faster than current state-of-the-art methods. The semi-direct approach ...
UZH Robotics and Perception Group
RI Seminar: Bilge Mutlu : Human-Centered Methods for Designing Robotic Products
Bilge Mutlu Assistant Professor, University of Wisconsin April 04, 2014 Abstract Robotic products constitute an emerging family of technologies that holds ...
cmurobotics
A.I. vs. Pathologists: Survival of the Fittest | Sahir Ali | TEDxSugarLand
Artificial Intelligence and it's promise in predicting cancer outcome: every patient deserves their own equation. Dr. Sahirzeeshan Ali is a research scientist at the ...
TEDx Talks
cekfslam
Vídeo demostración de código Autores: Haiqiang Zhang; Lihua Dou; Documentación: Optimization of the Simultaneous Localization and Map Building Algorithm ...
Daniel Gomez Gomez
iCub learns objects and recognizes its own and the human's body with a developmental approach
See the pdf: pdf: http://www.isir.upmc.fr/files/2013ACLI2906.pdf iCub learns objects and recognizes its own and the human's body with a developmental ...
iCub Paris
Cloud AI: How to Get Started Injecting AI Into Your Applications (Cloud Next '18)
Every organization's goal in adopting AI is to solve real-world problems. How can developers and data scientists be more productive using a comprehensive set ...
Google Cloud Platform
Fetching Omnicopter
Fetching Omnicopter We have developed a computationally efficient trajectory generator for fully actuated multirotor vehicles, i.e. vehicles that can ...
Dario Brescianini
Distributed-Parameter Modeling, Design and Control for Robotics, Automation and Mechatronics
Advances in Distributed-Parameter Modeling, Design and Control for Robotics, Automation and Mechatronics Kok-Meng Lee, Professor Georgia Institute of ...
NCState
Curiosity-driven learning and development | Pierre Yves Oudeyer | A-Talk
Curiosity-driven learning and development: How robots can help us understand humans A great mystery is how human infants develop: how they discover their ...
SoftBank Robotics Europe
Bay Area Robotics Symposium (BARS) 2018
Welcome to the 2018 Bay Area Robotics Symposium! This symposium aims to bring together roboticists from the Bay Area. The program will consist of a mix of ...
Stanford Autonomous Systems Laboratory
MIT Bootcamps: Intro to Deep Tech with Dr. Josh Siegel
The webinar will provide a high-level overview of emerging areas in DeepTech including the Internet of Things, Autonomous Vehicles, Deep Learning, and ...
MIT Bootcamps
Alberto Bemporad | Embedded Model Predictive Control
Recent Advances in Embedded Model Predictive Control Model Predictive Control (MPC) is one of the most successful techniques adopted in industry to control ...
University of Michigan Engineering
Brain-Controlled Robotic Arm System based on Multi-Directional CNN-BiLSTM Network using EEG Signals
Video clip: Brain-Controlled Robotic Arm System based on Multi-Directional CNN-BiLSTM Network using EEG Signals This article clip has been published in ...
Ji-Hoon Jeong
ICRA 2020 - ''Learning Grasping Points for Garment Manipulation in Robot-Assisted Dressing''
''Learning Grasping Points for Garment Manipulation in Robot-Assisted Dressing'' This is the supplementary video for the Zhang and Demiris IEEE ICRA 2020.
Zhang Fan
Understanding Control Systems: Introduction
Explore real-life examples to understand and gain insights into fundamental control systems concepts. These MATLAB® Tech Talks cover control systems topics ...
MATLAB
RI Seminar : Sangbae Kim : Actuation, structure and control of the MIT cheetah robot
Sangbae Kim Assistant Professor, MIT October 04, 2013 Abstract In designing a new generation of legged robots, it is critical to understand the design principles ...
cmurobotics
ICRA 2015 - Alessandro De Luca - A Control Architecture for Human Robot Collaboration 1
IEEE Robotics and Automation Society
Social and Emotional Artificial Intelligence
Given that emotion is a key element of human interaction, enabling artificial agents with the ability to reason about affect is a key stepping stone towards a future ...
Microsoft Research