Turning 2D into depth images
Most cameras just record colour but now the 3D shapes of objects, captured through only a single lens, can be accurately estimated using new software ...
UCL
Real-World Robot Learning (TensorFlow Dev Summit 2018)
Alex Irpan discusses real-world robot learning. In the past, research has shown that with enough real world robot data, we can teach a real robot how to pick up ...
TensorFlow
Robots, Performance, and Kits - OH MY!: Kelly Hammond
Robots have captured imaginations and made for exciting cinema for decades, but it may not be the first thing that comes to mind when you think of operating ...
Intel Open Source
Environment Modelling For Robot Vision Using Kinect
Demonstration of proposed work. This research represents an integrated approach of reconstructing three dimensional environments for robotic navigation.
Ahnaf Tabrez Alam
Stanford Seminar - Robotic Autonomy and Perception in Challenging Environments
Christoffer Heckman CU Boulder January 17, 2020 Perception precedes action, in both the biological world as well as the technologies maturing today that will ...
stanfordonline
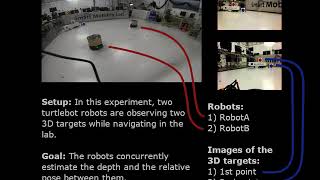
A Framework for Depth Estimation a Relative Localization of Ground Robots using Computer Vision
The 3D depth estimation and relative pose estimation problem within a decentralized architecture is a challenging problem that arises in missions that require ...
Pedro Miraldo
11.4: Introduction to Computer Vision - Processing Tutorial
This video covers the basic ideas behind computer vision. OpenCV for Processing (Java) and the Kinect are demonstrated. This accompanies Chapter 16 of ...
The Coding Train
Research challenges in using computer vision in robotics systems
ECE Seminar Series: Modern Artificial Intelligence Speaker: Martial Hebert, Carnegie Mellon University.
NYU Tandon School of Engineering
Visual-based Autonomous Robotics Navigation in Unknown Environments
A mobile robot simulated with Gazebo navigates autonomously in an unknown environment using stereo cameras. It computes depth and builds a map (a digital ...
Raul Correal
Focus tunable liquid lenses in Machine Vision
Deep dive into the world of liquid lenses for machine vision applications. Learn about this unique technology for fast and reliable focusing. Optical and ...
optotune
Camera Calibration with MATLAB
Camera calibration is the process of estimating the intrinsic, extrinsic, and lens-distortion parameters of a camera. It is an essential process to correct for any ...
MATLAB
Pixy2 Camera - Image Recognition for Arduino & Raspberry Pi
Pixy2 from DFRobot - https://www.dfrobot.com/product-1752.html Full article with code at https://dbot.ws/pixy2 More articles at https://dronebotworkshop.com Tell ...
DroneBot Workshop
Developments in stereo vision systems in robotics and beyond
Presented by Dr Heiko Hirschmueller – co-Founder, Roboception Including: SGM: From robotics and remote sensing to driver assistance Confidence and error ...
AutoSens
Yolo V4 - How it Works & Why it's So Amazing!
Find out what makes YOLOv4 — Superior, Faster & More Accurate in Object Detection. ▻YOLOv4 Course + Github ...
Augmented Startups
Robust, Visual-Inertial State Estimation: from Frame-based to Event-based Cameras
I will present the main algorithms to achieve robust, 6-DOF, state estimation for mobile robots using passive sensing. Since cameras alone are not robust ...
Microsoft Research
What Is Time-of-Flight? – Vision Campus
A ToF camera delivers 3D image information and helps to solve tasks where 2D data isn't enough. For inspection tasks in low-contrast situations or varying light ...
Basler AG
ENB339 lecture 10: perceiving depth & 3D reconstruction
Newer version of this, visit robotacademy.net.au In this last lecture we look at the many mechanisms we use to perceive the distance of objects in the world.
Peter Corke
An introduction to edge computing for computer vision and robotics - IFM
This talk is an introductory look at how the rise of distributed and edge computing has enhanced computer vision and sensor fusion workloads. We'll take a look ...
celebrateubuntu
Big Data to Fight Wildfire, Computer Vision, Groundwater Research, A Robot Parade: On Beyond
00:55 - WiFire: Technology to Predict and Prevent the Spread of Wildfires, 09:17 - Robot Parade, 14:39 - Portrait of a Scientific Glassblower, 18:34 - Recharged: ...
University of California Television (UCTV)
Vision-based Self-contained Target Following Robot using Bayesian Sensor Fusion
Andrés Echeverri, Anthony Hoak, Juan Tapiero Bernal, Henry Medeiros. Abstract— Several approaches for visual following robots have been proposed in ...
Andrés Felipe Echeverri Guevara
Environment Modelling For Robot Vision Using Kinect Demonstration
This research represents an integrated approach of reconstructing three dimensional environments for robotic navigation. It mainly focuses on three dimensional ...
Ekramul Hoque
Selecting The Right Machine Vision Camera Using EMVA 1288 Data (FULL)
Rather read than watch? View the White Paper version here: http://www.ptgrey.com/white-paper/id/10912 Download the PDF Presentation here!
FLIR Integrated Imaging Solutions
Robotic Materials Demonstration of Its All-in-one Embedded Intelligence for Robotic Manipulation
For more information about embedded vision, including hundreds of additional videos, please visit http://www.embedded-vision.com. Austin Miller, lead ...
Edge AI and Vision Alliance
Data-Efficient Decentralized Visual SLAM (ICRA18 Video Teaser)
Decentralized visual simultaneous localization and mapping (SLAM) is a powerful tool for multi-robot applications in environments where absolute positioning is ...
UZH Robotics and Perception Group
Carme Torras - Clothing assistants: Challenges for robot learning
Abstract: Textile objects pervade human environments and their versatile manipulation by robots would open up a whole range of possibilities, from increasing ...
IEEE.RAS.ICRA
MIT 6.S094: Convolutional Neural Networks for End-to-End Learning of the Driving Task
This is lecture 3 of course 6.S094: Deep Learning for Self-Driving Cars taught in Winter 2017. This lecture introduces computer vision, convolutional neural ...
Lex Fridman
Fun Research in Computer Vision and Robotics
Abstract: In this talk, I would like to touch upon highlights of various research and development in which I was involved in the area of computer vision and ...
Santa Fe Institute
Gingerbread Robot Vision
The video presents the core machine vision in a demanding four vision system and four Staubli robot system. The solution is based on Tordivel's Scorpion ...
Thor Vollset
Ubiquitous Computer Vision | David Moloney | TEDxDCU
An insightful look at the future of technology. David Moloney is the Chief Technology Officer of Movidius and has a BEng in Electronic Engineering Dublin City ...
TEDx Talks
Real-Time Visual Localisation and Mapping with a Single Camera
In my work over the past five years I have generalised the Simultaneous Localisation and Mapping (SLAM) methodology of sequential probabilistic mapping, ...
Microsoft Research
Creating Intelligent Machines with the Isaac SDK
By attending this webinar, you'll learn to program a basic Isaac codelet to control a robot, create a robotics application using the Isaac compute-graph model, test ...
NVIDIA Developer
7. Conscious of the Present; Conscious of the Past: Language
Introduction to Psychology (PSYC 110) This lecture finishes the discussion of language by briefly reviewing two additional topics: communication systems in ...
YaleCourses
Seeing, believing, and computing
Garrett Souza is analyzing the affect of visual media on implicit biases: how does what we see in images affect how we think? Watch more videos from MIT: ...
Massachusetts Institute of Technology (MIT)
Movidius, computer vision for IoT, drones, smartphones, IP cameras and more to come
Movidius provides machine vision technology, they released Myriad 2, they claim to be the industry's first always-on vision processor. It delivers ...
Charbax
CVFX Lecture 24: Structured light scanning
ECSE-6969 Computer Vision for Visual Effects Rich Radke, Rensselaer Polytechnic Institute Lecture 24: Structured light scanning (4/24/14) 0:00:00 Structured ...
Rich Radke
A Tutorial on Stereo Vision for 3D Depth Perception (Preview)
For the full version of this video, along with hundreds of others on various embedded vision topics, please visit ...
Edge AI and Vision Alliance
The End of Cloud Computing
"I'm going to take you out to the edge to show you what the future looks like." So begins a16z partner Peter Levine as he takes us on a "crazy" tour of the history ...
a16z
Robotics 2 U2 (Vision and AI) S2 (Problem Solving and Searching) P4 (Breadth First and AStar)
In this video, we learn about two more problem-solving algorithms: breadth-first, an uninformed offline method, and A* (pronounced 'A-Star'), an informed ...
Angela Sodemann
But how does bitcoin actually work?
The math behind cryptocurrencies. Home page: https://www.3blue1brown.com/ Brought to you by you: http://3b1b.co/btc-thanks And by Protocol Labs: ...
3Blue1Brown
IROS TV Episode 2 @ IROS 2019
IROS TV comes to you from the Venetian Hotel in Macau for the the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems. On the show ...
WebsEdgeEducation
Deep Learning Interview Questions And Answers | AI & Deep Learning Interview Questions | Simplilearn
This Deep Learning interview questions and answers video will help you prepare for Deep Learning interviews. This video is ideal for both beginners as well as ...
Simplilearn
REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time
In this video, we solve the problem of estimating dense and accurate depth maps from a single moving camera. A probabilistic depth measurement is carried out ...
UZH Robotics and Perception Group