Differences between journals, Proceedings, Reviewed papers and conferences : Researchersjob
These are more or less the most common question, which can come in any time the researchers level (Beginners, Intermediate), I'm trying to answer all these ...
Researchersjob
IEEE Formatting for Conference Paper
Short video on how to format your article according to certain types of formatting style as required by you conference provider. This video shows an example of a ...
safiaoreo
Browsing Journals, Magazines and Conference Proceedings
Learn how to browse Journals, Magazines, and Conference Proceedings in IEEE Xplore.
IEEE Xplore
How to Download IEEE Research papers For Free ll Download Paid Research Papers Free of Cost
IEEE xplore-https://ieeexplore.ieee.org/Xplore/home.jsp Sci Hub-https://sci-hub.tw/ Hi friends my name is HEMANT KUMAR . and your most welcome in my ...
SMART STUDY EDUCATION
Write Your First IEEE Conference Paper using Latex [A to Z]
Timeline of This Video: Brief Introduction of the video contents: 00:32 From IEEE Explore to Author Centre : 1:54 From Google to Author Centre: 03:07 The ...
digitidea
IEEE HASE 2017 - Award Winning Student Paper Presentation
This is my presentation on the research paper titled 'Effectiveness of Association Rules Mining for Invariants Generation in Cyber-Physical Systems.' It took place ...
Koyena Pal
6 Key Rules to IEEE Citation Style
Pick up the basics on how to write your bibliography using the IEEE citation style. Learn from common citation mistakes made when citing book chapters, journal ...
nuslibraries
How to Publish a Technical Paper with IEEE
In the summer of 2018, the IEEE hosted a series of live authorship workshops in Australia. The workshops focused on how to publish a technical paper with IEEE ...
IEEE Xplore
Discover SMPTE Content in IEEE Xplore
This one-hour briefing will provide an overview of how to find and use SMPTE standards, journal articles, and conference proceedings in IEEE Xplore®.
smpteconnect
How to Effectively Discover and Use IEEE Information to Further Your Research
In this instructional video, Professor Gaurav Sharma guides an engineering student in India through the research process using the IEEE Xplore Digital Library.
IEEE Xplore
11. How to write journal or conference paper using templates in MS Word 2007?
Md Aktaruzzaman Assistant Professor, IUT, Gazipur, Bangladesh PhD Student, Monash Uni, Melbourne, Australia.
akhtarvic
Fast Time-optimal Avoidance of Moving Obstacles for High-Speed MAV Flight
Video attachement for paper Marius Beul and Sven Behnke: "Fast Time-optimal Avoidance of Moving Obstacles for High-Speed MAV Flight" In Proceedings of ...
nimbro
Referencing Published Paper at Conference Proceedings
In this video, I show you the actual process I took to obtain more information for a reference. It's important to really investigate and provide as much information ...
Barbara Schroeder
Guiding Smombies #ismar2018
Uwe Gruenefeld, Tim Claudius Stratmann, Jinki Jung, Hyeopwoo Lee, Jeehye Choi, Abhilasha Nanda, and Wilko Heuten. Guiding smombies: augmenting ...
International Symposium on Mixed and Augmented Reality (ISMAR)
VTR2 highlights (medium version) @ Sudbury (2016)
This video shows some highlights from a field test we conducted in June 2016 at an old sand and gravel pit in Sudbury, Ontario, Canada. We taught our robot a ...
utiasASRL
Medium-Voltage Power Converters and their Applications - Hirofumi Akagi
This talk has an intensive discussion on the modular multilevel cascade converter (MMCC) family for medium-voltage grid connection and motor drives.
NC State ECE
Triaged Multi-Experience Localization (MEL) @ UTIAS (ICRA 2017)
We have been developing a visual route following navigation stack called Visual Teach and Repeat (VT&R) for several years. The version in this video uses a ...
utiasASRL
ICRA 2020: Beyond Photometric Consistency: Gradient-based Dissimilarity
Video presentation for ICRA 2020 paper Jan Quenzel, Radu Alexandru Rosu, Thomas Läbe, Cyrill Stachniss, and Sven Behnke: "Beyond Photometric ...
nimbro
ICRA'2018: Real-time Semantic Segmentation of Crop and Weed for Precision Agriculture Robots ...
A. Milioto, P. Lottes, and C. Stachniss, “Real-time Semantic Segmentation of Crop and Weed for Precision Agriculture Robots Leveraging Background ...
Cyrill Stachniss
Guiding robots toward better decisions
With the aim of developing a Risk Aware Multi-Policy Decision Making algorithm, a University of Michigan researcher becomes a step closer to guiding robots in ...
University of Michigan Engineering
Gaussian Process Motion Planning
This work appears in the proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2016. Authors - Mustafa Mukadam, Xinyan Yan ...
Georgia Tech Robot Learning Lab
OctArm - a Soft Robotic Manipulator
This video was included in video the Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct. 2007, San Diego, CA.
Bryan Jones
Autonomous Navigation of Hexapod Robots with Vision-based Controller Adaptation - ICRA2017
"Autonomous Navigation of Hexapod Robots With Vision-based Controller Adaptation", Marko Bjelonic, Timon Homberger, Navinda Kottege, Paulo Borges, ...
Navinda Kottege
Triaged Multi-Experience Localization (MEL) @ UTIAS (ICRA 2017)
We have been developing a visual route following navigation stack called Visual Teach and Repeat (VT&R) for several years. The version in this video uses a ...
utiasASRL
How to submit research articles to Elsevier journals #Elsevier #submission tutorials
In this video, let me show you how to submit research manuscript for Elsevier Journals, A complete guide and step wise process for your submission. The video ...
PhDians
Directional TSDF: Modeling Surface Orientation for Coherent Meshes
Video attachement for paper: Malte Splietker and Sven Behnke: Directional TSDF: Modeling Surface Orientation for Coherent Meshes In Proceedings of ...
nimbro
SC19 Awards Presentation: ACM/IEEE-CS Ken Kennedy Award - Geoffrey Fox, Indiana University
The SC Conference showcases the best and brightest in HPC, both the rising stars and those who have made a lasting impression. A variety of awards from the ...
SC Conference Series
Online DCM Trajectory Generation for Push Recovery of Torque-Controlled Humanoid Robots
This video shows the latest results of the Dynamic Interaction Control lab https://dic.iit.it in the whole body walking of humanoid robots. Paper in the proceedings ...
iCub HumanoidRobot
Informed RRT* @ UTIAS (2014)
This video shows an improvement to the popular RRT* planning algorithm that focusses the search area by eliminating some regions that cannot possibly ...
utiasASRL
#8 – Technology & Creativity with Professor Aljosa Smolic & JFL
In this eight episode of the bodymindself™ podcast psychologist and cognitive scientist John Francis Leader (JFL) meets Professor of Creative Technologies ...
JFLdotCOM
Decentralized SLAM @ UTIAS (IROS 2010)
This video is associated with the paper: Leung K Y K, Barfoot T D, and Liu H H T. "Decentralized Simultaneous Localization and Mapping for Dynamic and ...
utiasASRL
Motion Planning with Graph-Based Trajectories and Gaussian Process Inference
This work appears in the proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2017. Authors - Eric Huang, Mustafa Mukadam, ...
Georgia Tech Robot Learning Lab
Exploring Technology & Creativity with Professor Aljosa Smolic & JFL
Watch the full podcast here: https://youtu.be/4jum2sCEDGk In this eight episode of the bodymindself™ podcast psychologist and cognitive scientist John Francis ...
JFLdotCOM
[ACSIC Speaker Series #5] Writing Research Papers for Premier Forums in Knowledge and Data Engine...
Time: Jan. 22nd, 10:00--11:30am, EST Title: Writing Research Papers for Premier Forums in Knowledge and Data Engineering Presenter: Xindong Wu is a ...
Acsic People
Appearance-Based Lidar @ UTIAS (ICRA 2011)
This video shows the benefits of using reflectance images in the standard sparse-feature visual pipeline traditionally used with passive cameras. This video is ...
utiasASRL
FARLAP: Fast Robust Localisation using Appearance Priors
G. Pascoe, W. Maddern, A. D. Stewart, and P. Newman, “FARLAP: Fast Robust Localisation using Appearance Priors,” in Proceedings of the IEEE International ...
ORI - Oxford Robotics Institute
How to make IEEE Formated paper?
Do you want to prepare an IEEE paper format, let's check it out, This is IEEE paper format (Updated will be done,if they changes) Please comment enhance my ...
LearnElectronics
Triaged Multi-Experience Localization (MEL) @ UTIAS (ICRA 2017)
We have been developing a visual route following navigation stack called Visual Teach and Repeat (VT&R) for several years. The version in this video uses a ...
utiasASRL
TReX Mapping @ Sudbury (2016)
This video shows some highlights from a field test we conducted in June 2016 at an old sand and gravel pit in Sudbury, Ontario, Canada. Tethered Robot ...
utiasASRL
Blender & OpenCV - Windows Guide - Facial Motion Capture
This is a step by step guide to install OpenCV for use in Blender and configure the Vincent model to capture facial landmarks. Github Repository: ...
Gadget Workbench
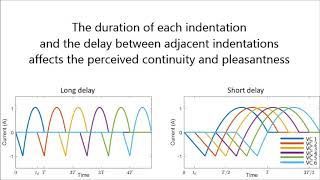
A Social Haptic Device to Create Continuous Lateral Motion Using Sequential Normal Indentation
Video by Heather Culbertson to accompany a demonstration and associated paper: Heather Culbertson, Cara M. Nunez, Ali Israr, Frances Lau, Freddy Abnousi, ...
Stanford CHARM Lab
VMocap: Video Motion Capture from the Part Confidence Maps of Multi-Camera Images (IROS 2018)
Takuya Ohashi, Yosuke Ikegami, Kazuki Yamamoto, Wataru Takano, Yoshihiko Nakamura, “Video Motion Capture from the Part Confidence Maps of ...
robotics_ynl