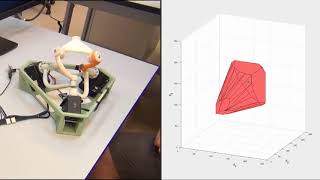
Implementation of an Octahedral Stewart-Gough platform
Results from my Thesis: J. Borràs, "Singularity-invariant leg rearrangements in Stewart-Gough platforms", Advisor: Prof. Federico Thomas, 2011. Related ...
Júlia Borràs Sol
A Novel Capacitive type Torque Sensor for Robotic Applications
Title : A Novel Capacitive type Torque Sensor for Robotic Applications - Author : Yong Bum Kim, Uikyum Kim, Dong-Yeop Seok, JinHo So, and Hyouk Ryeol ...
Robotics Innovatory
Stiffness Analysis of Underactuated Fingers and its Application to Proprioceptive Tactile Sensing
by Bruno Belzile and Lionel Birglen Polytechnique Montreal, 2017 See "Stiffness Analysis of Underactuated Fingers and Its Application to Proprioceptive Tactile ...
PolyLabrobot
Soft Artificial Muscles
IEEE/ASME Transactions on Mechatronics Journal | Full Manuscript https://ieeexplore.ieee.org/abstract/document/8788588 University of Wollongong, Australia ...
Charbel Dalely Tawk
2020AIM/TMech Quasi-Direct Drive Actuation for a Lightweight Hip Exoskeleton
exoskeleton, #quasidirectdrive, #hightorqueactuator, #wearblerobots, #humanaugmentation #qdd Paper link: ...
Biomechatronics Intelligent Robotics Lab
3D Printable Linear Soft Vacuum Actuators Their Modeling, Performance Quantification and Application
IEEE/ASME Transactions on Mechatronics Journal | Full Manuscript https://ieeexplore.ieee.org/abstract/document/8788588 University of Wollongong, Australia ...
Charbel Dalely Tawk
Designing Anthropomorphic Robot Hand with Active Dual-Mode Twisted String Actuation Mechanism
In the paper, using the active dual-mode twisted string actuation (TSA) mechanism and tiny tension sensors on the tendon strings, an anthropomorphic robot ...
MSC kaist
Remotely controlled underwater vehicle
Kopman, V., Cavaliere, N., Porfiri, M.: 2012: "MASUV-1: a miniature underwater vehicle with multidirectional thrust-vectoring for safe animal interactions", ...
Dynamical Systems Laboratory
Schonflies motion PARAllel robot (SPARA), a Redundant Parallel Robot with Unlimited Rotation
This video presents a kinematically redundant parallel mechanism capable of generating the Schonflies Motion with unlimited rotation capabilities. It is shown ...
Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory
Input Uncertainty Enhanced Non-Singleton FLCs for Long-Term Navigation of UAVs
For more details please check our paper: C. Fu, A. Sarabakha, E. Kayacan, C. Wagner, R. John, and J. M. Garibaldi, "Input Uncertainty Sensitivity Enhanced ...
Andriy Sarabakha
Sensing One Nanometer Over Ten cm: A Microencoded Target for Visual In-Plane Position Measurement
Supplemental material for the article published in Transactions on Mechatronics named "Sensing One Nanometer Over Ten Centimeters: A Microencoded ...
Vernier Library
Wearable Robotic Technologies - Chapter 4 - Prostheses (Part 3)
HumanoidRobots
Tech20 Virtual: From outer space to subsea
Xiu-Tian Yan, Space Mechatronic Systems Technology Laboratory, University of Strathclyde Europe has embarked on a strategic research effort in developing a ...
OGTC
QDD Actuation for Lightweight Hip Exoskeleton with High Backdrivability & High Bandwidth
exoskeleton, #quasidirectdrive, #hightorqueactuator, #wearblerobots, #humanaugmentation Paper link: https://haosu-robotics.github.io/img/... Yu, S., Huang ...
Biomechatronics Intelligent Robotics Lab
A Two-body Rigid/Flexible Model of Needle Steering Dynamics in Soft Tissue
Robotics-assisted needle steering can enhance targeting accuracy in percutaneous interventions. This paper presents a novel dynamical model for robotically ...
Mahdi Tavakoli Afshari
A 2-Speed Small Transmission Mechanism Based on Twisted String Actuation and a Dog Clutch
ICRA 2018 Spotlight Video Interactive Session Tue PM Pod Q.1 Authors: Jeong, Seok Hwan; Kim, Kyung-Soo Title: A 2-Speed Small Transmission Mechanism ...
ICRA 2018
Field Test of an Ankle-Foot Orthosis
Field test of the Ankle-Foot Orthosis used in paper Y. Li, A. Becker, K. A. Shorter, T. Bretl, and E. T. Hsiao-Wecksler, "Estimating System State During Human ...
Aaron Becker
AMTL - Automated Traction Measurement Platform
Sliker, L.J., Kern, M.D., Rentschler, M.E., "An Automated Traction Measurement Platform and Empirical Model for Evaluation of Rolling Micro-Patterned Wheels," ...
AMTL at CU-Boulder
Finite Element Modeling of 3D Printed Linear Soft Vacuum Actuators (LSOVA)
We show how finite element modeling (FEM) can be effectively used to predict the behavior of soft actuators and optimize their performance prior to their ...
Charbel Dalely Tawk
Nonlinear Anti-swing Positioning Crane Control With Varying Rope Length
[IEEE CSS Video Clip Contest 2014 Submission] Authors: Ning Sun, Yongchun Fang, and He Chen Overhead crane systems have been widely used in modern ...
He Chen
A step towards the automation of ICSI...
Fertility & Sterility
نحوه ارجاع دادن در نرم افزار ورد (citation, Microsoft word) در نرم افزار مندلی Mendeley 1.19
نحوه ارجاع دادن در نرم افزار ورد (citation, Microsoft word) در نرم افزار مندلی Mendeley 1.19 از دوره آشنایی با نرم افزار مندلی Mendeley دانلود 100% رایگان نسخه کامل در ...
Amoozesh 365
Piezoelectric actuation for mobile miniature robot
Piezoelectric miniature robots are mobiles robots with a size of a few cm3 actuated by piezoelectric materials.
Hassan Hariri
Robotlarda güvenli görev yürütme - Sanem Sarıel
Kuzeybatıda Yapay Öğrenme Yaz Okulu 2019
Flight test of fully autonomous vision-based net-recovery for a fixed-wing UAV
SNU FDCL and ICSL performed the flight test of fully autonomous vision-based net-recovery for a fixed-wing UAV. The related paper: H. J. Kim, M. Kim, H. Lim, ...
Mingu Kim
3D Printable Linear Soft Vacuum Actuators Their Modeling, Performance Quantification and Application
IEEE/ASME Transactions on Mechatronics https://ieeexplore.ieee.org/abstract/document/8788588 University of Wollongong, Australia School of Mechanical, ...
AMBER
Design of Digital Demodulation Circuit for Closed Loop Control of Resonant MEMS Gyroscopes
Title: Design of Digital Demodulation Circuit for Closed Loop Control of Resonant MEMS Gyroscopes Author: Zhenyi Gao, Bin Zhou, Yang Li, Qi Wei, Rong ...
IEEE Sensors
IEEE Industrial Electronics Society | Wikipedia audio article
This is an audio version of the Wikipedia Article: https://en.wikipedia.org/wiki/IEEE_Industrial_Electronics_Society 00:00:15 1 Publications 00:00:25 1.1 ...
wikipedia tts
Mechatronics Mechanical System Control - It's the Software!
Google Tech Talks September 21, 2006 David Auslander ABSTRACT The history of mechanical system control is one of striving for ever greater complexity.
Google TechTalks
2021-02-03 ENGR101 Course Overview
Biomechatronics Intelligent Robotics Lab
Control de posición de robots manipuladores | Estabilidad de Lyapunov
En este video se aborda el tema de control de posición de robots manipuladores y la estabilidad en el sentido de Lyapunov. (Clase dirigida a mis alumnos de ...
César Chávez - Ingeniería -
EDS BIG y Recursos de EBSCO para Ciencias, Tecnología e Ingenierías y IEEE UASLP
Se les comparte la Sesión de EBSCO Discovery Service y Recursos de EBSCO para Ciencias, Tecnología e Ingenierías además de IEEE UASLP.
Sistema de Bibliotecas UASLP
UT Austin Portugal 2020 Annual Conference | Keynote Speaker Luis Sentis (UT Austin)
Within the scope of our 2020 Annual Conference, Luis Sentis was the second Keynote Speaker of the day, discussing "“Invention and commercialization of ...
UT Austin Portugal Program
Distinguished Lecture Series #72 - Professor Mohamed Benbouzid
Mohamed Benbouzid was born in Batna, Algeria, in 1968. He received the B.Sc. degree in electrical engineering from the University of Batna, Batna, Algeria, ...
Engineering UTM
Slosh control by smoothing human-operator commands from BIT
The human-operator commands is modified by the smoother to create a smoothed command, which drive the tank toward the desired state with minimal slosh.
jie huang
Constrained Orientation Control of a Spherical Parallel Manipulator
This video demonstrates the research work “Constrained Orientation Control of a Spherical Parallel Manipulator Via Online Convex Optimization” published in ...
ALARIS NU
haptics renderinghapticeffects 4 2 d 102713
Allison Okamura
MIT RoboSeminar - Neville Hogan - Studying human performance may inform robotics
MIT - September 20, 2019 Neville Hogan Professor, MIT Department of Mechanical Engineering Department of Brain and Cognitive Sciences.
MIT Robotics
【研究生活でつまずかないために!第2弾】『伝わる英語論文を書くための英語のコツ』動詞を活かしてシンプル明快に研究を説明しよう!研究成果を適切に報告しよう!
Web of Science Training Japan
Mechatronics
Mechatronics is a design process that includes a combination of mechanical engineering, electrical engineering, telecommunications engineering, control ...
Audiopedia
RI Seminar : Sangbae Kim : Actuation, structure and control of the MIT cheetah robot
Sangbae Kim Assistant Professor, MIT October 04, 2013 Abstract In designing a new generation of legged robots, it is critical to understand the design principles ...
cmurobotics
MIT MechE & the Information Age, 4/2000 (6/6): Tomizujka, Hirleman, Hunter, Lloyd & Panel
Please Subscribe! http://www.youtube.com/c/MITVideoProductions?sub_confirmation=1.
MIT Video Productions