How to Effectively Discover and Use IEEE Information to Further Your Research
In this instructional video, Professor Gaurav Sharma guides an engineering student in India through the research process using the IEEE Xplore Digital Library.
IEEE Xplore
Welcome to IEEE ICC 2015
The 2015 IEEE International Conference on Communications (ICC) will be held in London, UK from 8-12 June. Themed “Smart City & Smart World,” with its ...
IEEEComSoc
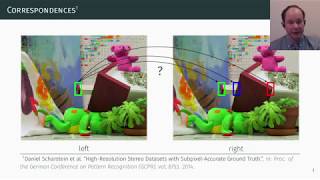
Talk by Jan Quenzel: Beyond Photometric Consistency: Gradient-based Dissimilarity for Improving VO..
ICRA 2020 talk about the paper: J. Quenzel, R. A. Rosu, T. Laebe, C. Stachniss, and S. Behnke, “Beyond Photometric Consistency: Gradient-based Dissimilarity ...
Cyrill Stachniss
Chopper Amplifiers Demystified Kofi A. A. Makinwa
In CMOS amplifiers, component mismatch can easily give rise to offsets of several millivolts. However, this can be reduced to the microvolt level by the ...
IEEE Solid-State Circuits Society
How to Publish a Technical Paper with IEEE
In the summer of 2018, the IEEE hosted a series of live authorship workshops in Australia. The workshops focused on how to publish a technical paper with IEEE ...
IEEE Xplore
IEEE Formatting for Conference Paper
Short video on how to format your article according to certain types of formatting style as required by you conference provider. This video shows an example of a ...
safiaoreo
ICRA'2018: Real-time Semantic Segmentation of Crop and Weed for Precision Agriculture Robots ...
A. Milioto, P. Lottes, and C. Stachniss, “Real-time Semantic Segmentation of Crop and Weed for Precision Agriculture Robots Leveraging Background ...
Cyrill Stachniss
What's New With IEEE and IEEE Xplore
IEEE is the world's largest professional association for the advancement of technology. Learn more about what's new with IEEE and IEEE Xplore.
IEEE Xplore
Discover SMPTE Content in IEEE Xplore
This one-hour briefing will provide an overview of how to find and use SMPTE standards, journal articles, and conference proceedings in IEEE Xplore®.
smpteconnect
Browsing Journals, Magazines and Conference Proceedings
Learn how to browse Journals, Magazines, and Conference Proceedings in IEEE Xplore.
IEEE Xplore
Planning on a Network of Paths @ UTIAS (IEEE Aerospace 2011)
This video shows a robot seeking a goal. It is using a novel path planning framework that is essentially a physical embodiment of an RRT planner. Video is ...
utiasASRL
IEEE VR 2020 Awards and Closing
IEEE Virtual Reality Conference
ICRA'2018: A General Framework for Flexible Multi-Cue Photometric Point Cloud Registration
B. Della Corte, I. Bogoslavskyi, C. Stachniss, and G. Grisetti, “A General Framework for Flexible Multi-Cue Photometric Point Cloud Registration,” in Proceedings ...
Cyrill Stachniss
High-Speed Segmentation of 3D Range Scans
I. Bogoslavskyi and C. Stachniss “Fast Range Image-Based Segmentation of Sparse 3D Laser Scans for Online Operation” In Proceedings of the IEEE/RSJ Int.
Cyrill Stachniss
Guiding robots toward better decisions
With the aim of developing a Risk Aware Multi-Policy Decision Making algorithm, a University of Michigan researcher becomes a step closer to guiding robots in ...
University of Michigan Engineering
Frishman et al., Enabling In-Bore MRI-Guided Biopsies, IEEE Haptics Symposium 2020
Samuel Frishman, Ali Kight, Ileana Pirozzi, Mela C. Coffey, Bruce L. Daniel, Mark R. Cutkosky, Enabling In-Bore MRI-Guided Biopsies With Force Feedback, ...
bdmlstanford
Informed RRT* @ UTIAS (IROS 2014)
UNIVERSITY OF TORONTO Autonomous Space Robotics Lab: http://asrl.utias.utoronto.ca YouTube Channel: http://www.youtube.com/utiasASRL This video ...
utiasASRL
Decentralized SLAM @ UTIAS (IROS 2010)
This video is associated with the paper: Leung K Y K, Barfoot T D, and Liu H H T. "Decentralized Simultaneous Localization and Mapping for Dynamic and ...
utiasASRL
ICRA'2018: Fast Image-Based Geometric Change Detection Given a 3D Model
Video trailer for the paper: E. Palazzolo and C. Stachniss, “Fast Image-Based Geometric Change Detection Given a 3D Model,” in Proceedings of the IEEE Int.
Cyrill Stachniss
TReX Mapping @ Sudbury (2016)
This video shows some highlights from a field test we conducted in June 2016 at an old sand and gravel pit in Sudbury, Ontario, Canada. Tethered Robot ...
utiasASRL
Effective free field of view scene exploration in VR and AR #ismar2018
Lili Wang, Antong Cao, Zhichao Li, Xuefeng Yang, and Voicu Popescu. Effective free field of view scene exploration in vr and ar. In Adjunct Proceedings of the ...
International Symposium on Mixed and Augmented Reality (ISMAR)
Life-long LIDAR Localisation in Changing Cities
W. Maddern, G. Pascoe, and P. Newman, “Leveraging Experience for Large-Scale LIDAR Localisation in Changing Cities,” in Proceedings of the IEEE ...
ORI - Oxford Robotics Institute
Batch Informed Trees (BIT*) @ UTIAS / CMU (ICRA 2015)
This video shows an improvement to the popular RRT* planning algorithm that focusses the search area by eliminating some regions that cannot possibly ...
utiasASRL
Efficient Model Identification for Tensegrity Locomotion
Shaojun Zhu, David Surovik, Kostas E. Bekris, Abdeslam Boularias. "Efficient Model Identification for Tensegrity Locomotion ". In Proceedings of the IEEE ...
Abdeslam Boularias
Motion Planning with Graph-Based Trajectories and Gaussian Process Inference
This work appears in the proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2017. Authors - Eric Huang, Mustafa Mukadam, ...
Georgia Tech Robot Learning Lab
Motor perpétuo? Carro a água? | Nerdologia
GASOLINA PETROBRAS GRID Para mais informações acesse: http://www.petrobras.com.br/naspistas No Nerdologia de hoje, vamos ver porque não existe um ...
Nerdologia
Basic Search in IEEE Xplore V2
Get tips on searching exact phrases, Boolean operators, refining your search, exporting results and more.
IEEE Xplore
Robotics and Automation Conference Video Proceedings, 2000
2000 ICRA: IEEE International Conference on Robotics and Automation. http://ethw.org/Archives:Robotics_and_Automation_Conference_Video_Proceedings ...
engineeringhistory
M2 Gripper: Extending the Dexterity of a Simple, Underactuated Gripper
The M2 Gripper, or Multi-Modality Gripper, consists of a modular thumb and a dexterous forefinger with both antagonist and agonist tendons. It is capable of both ...
Yale Grablab
3D SLAM for Planetary Worksite Mapping @ CSA Mars Emulation Terrain (IROS 2011)
This video shows an integrated field test of a 3D SLAM technique for planetary worksite mapping. The test was carried out at the Canadian Space Agency's Mars ...
utiasASRL
Natural Motion- Biped Learning to Walk Using Evolved Neural Nets
This work was done by Torsten Reil (and collaborators?) and used to be on the website naturalmotion.com. A video of more modern work is here: ...
Jeff Clune
Medium-Voltage Power Converters and their Applications - Hirofumi Akagi
This talk has an intensive discussion on the modular multilevel cascade converter (MMCC) family for medium-voltage grid connection and motor drives.
NC State ECE
tinyML Talks joint webinar with IEEE: The Intersection of SSCS and AI -- A Tale of Two Journeys
tinyML Talks joint webinar with IEEE Solid-State Circuits Society - recorded May 26, 2020 "The Intersection of SSCS and AI -- A Tale of Two Journeys" Vivienne ...
tinyML
Acoustic Steering of Roach Biobots
To help surviving victims buried under the rubble after natural disasters, biobots needs to localize them. The little backpack that biobot carries can detect where ...
iBionicSLab
Mid-air fingertip-based user interaction in mixed reality #ismar2018
Meghal Dani, Gaurav Garg, Ramakrishna Perla, and Ramya Hebbalaguppe. Mid-air fingertip-based user interaction in mixed reality. In Adjunct Proceedings of ...
International Symposium on Mixed and Augmented Reality (ISMAR)
Appearance-Based Lidar @ UTIAS (ICRA 2011)
This video shows the benefits of using reflectance images in the standard sparse-feature visual pipeline traditionally used with passive cameras. This video is ...
utiasASRL
CNN Tutorial- Introductory - Video #0
الوصلة مشروع بنحاول فيه نتكلم عن ونشرح ونبسّط مواضيع تقنية بالعربي. في مجموعة الفيديوهات ديه هنتكلم عن ال...
Al Waslah - الوصلة
Whole-Body Geometric Retargeting for Humanoid Robots
This video shows the latest results of the Dynamic Interaction Control lab https://dic.iit.it in the whole teleoperation of humanoid robots. Paper in the proceedings ...
iCub HumanoidRobot
Efficient Online Segmentation for Sparse 3D Laser Scans
I. Bogoslavskyi and C. Stachniss, “Efficient Online Segmentation for Sparse 3D Laser Scans,” PFG — Journal of Photogrammetry, Remote Sensing and ...
Cyrill Stachniss
Using the Springer LNCS 1703 Template
This video is a revised version of last year's video to explain how to organise your filing system and how to use the new 1703 version of the Springer LNCS ...
Richard Self
Singularidade humana e Ghost in the Shell | Nerdologia
A Vigilante do Amanhã – Ghost In The Shell Trailer Legendado: http://bit.ly/2kq26Hz Trailer Dublado: http://bit.ly/2kymrdO No Nerdologia de hoje vamos ver ...
Nerdologia
Dynamic Surface Modeling and Applications
Projects of Dr. Tony TUNG, Assistant Professor at Kyoto University, Matsuyama Laboratory, Graduate School of Informatics (2008-2014). Papers published in ...
Tony TUNG