Multi-segment soft robotic fingers enable robust precision grasping
Soft fingers should be designed with at least two independently-actuated serial segments to allow robots to choose between strength and precision when ...
MicroroboticsLab
05: Robotics 2 - Chapter 3 - Grasping (Part 2)
0:00:00 Start 0:00:02 Q & A: Grasping 0:12:16 Why a Taxonomy? 0:17:07 Cutkosky`s Grasp Taxonomy 0:28:09 Kamakura Taxonomy 0:39:03 The GRASP ...
KIT Lehre und Wissen
04: Robotics 2 - Chapter 3 - Grasping
0:00:00 Start 0:00:03 Recap: Building Humanoids 0:04:18 Q&A: Buliding Humanoids 0:09:43 Q&A: MMMm 0:20:21 Intro Chapter 03 - Graspingm 0:23:30 ...
KIT Lehre und Wissen
Learning hand-eye coordination for robotic grasping
More info at http://googleresearch.blogspot.com/2016/03/deep-learning-for-robots-learning-from.html.
Peter Pastor
QUT Closes the Loop for Robotic Grasping
Roboticists at QUT have developed a faster and more accurate way for robots to grasp objects, including in cluttered and changing environments, which has the ...
TheQUTube
Research at NVIDIA: Deep Object Pose Estimation for Semantic Robotic Grasping of Household Objects
For the first time, an algorithm trained only on synthetic data is able to beat a state-of-the-art network trained on real images for object pose estimation on several ...
NVIDIA
Robotics 2 - Chapter 3 - Grasping
HumanoidRobots
Grasping and Moving Objects with a Robotic Hand
A woman wearing a bionic hand created by a research group at Università Campus BioMedico di Roma, in Italy grasps and moves objects that she could not ...
IEEE Spectrum
Learning Ambidextrous Robot Grasping Policies - Dex-Net 4.0
Universal picking (UP), or reliable robot grasping of a diverse range of novel objects from heaps, is a grand challenge for e-commerce order fulfillment, ...
CITRIS
Closing the Loop for Robotic Grasping: A Real-time, Generative Grasp Synthesis Approach
Paper to appear at RSS 2018. https://arxiv.org/abs/1804.05172 Code available at https://github.com/dougsm/ggcnn This paper presents a real-time, ...
Doug Morrison
Robotic Grasping of Moving Objects by dynamic re-planning
Dynamic Grasp and Trajectory Planning for Moving Objects. Accepted paper link: https://link.springer.com/content/pdf/10.1007%2Fs10514-018-9799-1.pdf ...
naresh marturi
Ken Goldberg - Third wave robot grasping/excerpt
Ken Goldberg - Third wave robot grasping 3.2018.
HWASpeakersBureau
Robotic Grasping under Incomplete Observation
We consider the problem of grasp and manipulation planning when the state of the world is only partially observable. Specifically, we address the task of picking ...
GraspProject
Deep Reinforcement Learning for Vision-Based Robotic Grasping: A Simulated Comparative Evaluation of
ICRA 2018 Spotlight Video Interactive Session Thu AM Pod Q.7 Authors: Quillen, Deirdre; Jang, Eric; Nachum, Ofir; Finn, Chelsea; Ibarz, Julian; Levine, Sergey ...
ICRA 2018
From a Robot's Perspective: Teaching Robots to Grasp
We are teaching our robot arm to grasp commonly used objects with diverse appearances. We trained our models purely in simulation and they now achieve ...
NVIDIA Developer
Human-inspired robotic grasping of flat objects
Published in Robotics and Autonomous Systems. Authors: Iason Sarantopoulos and Zoe Doulgeri Automation & Robotics Lab, Dept. Electrical & Computer ...
Automation & Robotics Lab - Aristotle University of Thessaloniki
Learning ambidextrous robot grasping policies
Learning ambidextrous robot grasping policies. Jeffrey Mahler et al (2019), Science Robotics https://doi.org/10.1126/scirobotics.aau4984 Universal picking (UP), ...
ScienceVio
Robot grasping demo
Industrial robot grasping previously unseen objects. Music: www.TemplatesWise.com.
urobots GmbH
Affordance-Based Grasping and Manipulation in Real World Applications
Christoph Pohl*, Kevin Hitzler*, Raphael Grimm, Antonio Zea, Uwe D. Hanebeck and Tamim Asfour Institute for Anthropomatics and Robotics, Karlsruhe Institute ...
HumanoidRobots
Semantic Grasping through Wide and Deep Learning, Sonia Chernova
Robotics: Science and Systems Workshop Visual Learning and Reasoning for Robotic Manipulation Visual perception is essential for achieving robot autonomy ...
Samsung Strategy & Innovation Center
08: Robotics 2 - Chapter 3 - Grasping (Part 5)
0:00:00 Start 0:00:09 Grasping Known Objects 0:08:08 Grasping familiar/similar objects 0:09:44 Grasping Familiar Objects: Concept 0:15:39 Grasping ...
KIT Lehre und Wissen
Shape Completion Enabled Robotic Grasping
Description of work in "Shape Completion Enabled Grasping", submitted to IROS 2017. Details and our database of over 400000 voxel grid training pairs of ...
chaddech
Exploitation of Environmental Constraints in Human and Robotic Grasping
"Exploitation of environmental constraints in human and robotic grasping" by Clemens Eppner, Raphael Deimel, José Álvarez-Ruiz, Marianne Maertens and ...
IJRR Multimedia
Robot Grasping Contest 2015: the finals!
Robot Grasping Contest 2015 (finals). We challenged participants to be a robot for one day! Are you a good robot?
Lorenzo Jamone
Learning Continuous Control Actions for Robotic Grasping with Reinforcement Learning
Robots are nowadays increasingly required to deal with (partially) unknown tasks and situations. The robot has, therefore, to adapt its behavior to the specific ...
Loris Roveda
Robot Grasping Contest 2015: the qualifications.
Robot Grasping Contest 2015 (qualifications). We challenged participants to be a robot for one day! Are you a good robot?
Lorenzo Jamone
IROS 2016: Deep learning for robot grasping via simulation
IROS 2016 paper: "Deep Learning a Grasp Function for Grasping Under Gripper Pose Uncertainty" Authors: Edward Johns, Stefan Leutenegger and Andrew ...
Edward Johns
The Gripper Guys Explain How Soft Robotics Solves For Variability
Unsuccessful grasping is one of the major challenges of robotic automation. Robots have traditionally failed at managing the variability found in today's ...
Soft Robotics Inc.
Robots Learning to Toss
Learn more: http://tossingbot.cs.princeton.edu/ We've developed TossingBot, a robotic arm that picks up items and tosses them to boxes outside its reach range.
Andy Zeng
Seashell Effect Pretouch Sensing for Robotic Grasping
In Sensor Systems Lab at University of Washington, we introduces "seashell effect pretouch sensing", and demonstrates application of this new sensing modality ...
uwsensor
Intel's mug-grasping robot
Intel shows off it's latest innovation in mug-moving, with a robot which can detect and move objects. For more details, visit here: ...
ITPROmagazine
Robotics 2 - Chapter 3 - Grasping (Part 4)
HumanoidRobots
Learning a visuomotor controller for real world robotic grasping using easily simulated depth images
This video demonstrates the results of our approach of dynamically grasping moving objects in clutter. Our controller uses a neural net trained on simulated ...
UliAtUTube
Robotics Hand Grasping Using Self-Organisation
A ShadowRobot hand learnt to grasp by having every joint independently controlled by a neural network. The networks tend to self-organise into either a ...
Lorenzo Riano
A General Tactile Approach for Grasping Unknown Objects with a Humanoid Robot
The video shows an HRP-2 robot grasping unknown objects based on tactile feedback. The robot is not given precise kinematics and the location of the sensors, ...
icsTUMunich
Robot grasping simulation in AGX Dynamics
This video show a tutorial scene available in AGX Dynamics. It demonstrates how to use the DIRECT solver available for simulating very realistic contact friction ...
Algoryx
DexNet 2.0: 99% Precision Grasping
UC Berkeley AUTOLAB http://bit.ly/AUTOLAB Dex-Net 2.0: Deep Learning to Plan Robust Grasps with Synthetic Point Clouds and Analytic Grasp Metrics. Jeffrey ...
CITRIS
6-DOF GraspNet: Variational Grasp Generation for Object Manipulation
Generating grasp poses is a crucial component for any robot object manipulation task. In this work, we formulate the problem of grasp generation as sampling a ...
NVIDIA Developer
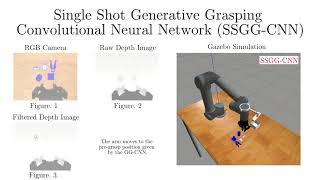
Single Shot Generative Grasping Convolutional Neural Network
Code is provided at: https://github.com/lar-deeufba/ssggcnn_ur5_grasping This paper proposes a two-step cascaded system with the Generative Grasping ...
LaR - Robotics Lab. - UFBA
The Gripper Guys Demonstrate Reliable Robotic Grasping with Soft Robotics
The Gripper Guys are back with another important message. Don't mistake our soft, flexible grippers for flimsy. We know you need your first pick to be as reliable ...
Soft Robotics Inc.
Walking Robot LAURON V: Grasping and other skills developed for DLR SpaceBot Cup
The six-legged walking robot LAURON V was equipped with a lightweight gripper, a 3D-laserscanner system and multiple cameras to cope with the challenges ...
FZIchannel
#2 - Robot Grasping for New Objects with Dr. Juxi Leitner
Dr. Juxi Leitner talks about robot grasping for new objects. Podcast topics: Robotic grasping and manipulation in both structured and unstructured environments, ...
AIR Code: AI and Robotics Podcast